Bell and teammates selected for NASA Unmanned Aircraft Systems Demo in 2020
North Carolina considers CASA radar network deployment
UMass researchers using radar to detect drones
CASA collaborates with Understory to validate hail and wind sensor measurements.
UMass produces short video describing CASA's counter drone research.
UMass researchers receive grant to keep skies safer by detecting low-flying drones
Midlothian-based weather radar providing vital statistics to keep residents safe during storms
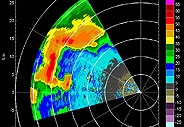
CASA Radar Aims To Improve How We Track And Study Severe Storms
New Radar System Helped Dallas Area in Christmas Tornado Outbreak
Sixth CASA radar installed in City of Fort Worth
Article describing the gap coverage problem and proposing CASA radars as a solution
Groundbreaking radar network in Dallas has local ties.
CASA radar tracks tornadoes down the street and up to the minute, literally!
Using advanced sensing, crowdsensing to predict urban waterflow, city needs
CASA researchers are leading the development of new apps and tools.
New system enables improved weather predictions in the region.
UMass Amherst is part of a consortium receiving a $10 million NSF grant
EWR Weather Radar installs radar in CASA Urban Demonstration Network
Zinks CAREER Research Will Make More Economical Sensor Networks for Border Security, Weather Forecasting, and Other Uses.
The tornado East Texas never saw coming - and why they may not see the next one.
City of Addison receives new weather radar technology.
A fourth component of the new radar system was installed Tuesday atop a municipal building in Addison.
The city of Midlothian received its newest addition when crews installed a CASA radar at the Midlothian Police Department Justice Center.
CASA tornado radar installed in Midlothian
New radar could save lives when spring storms hit DFW.
Johnson County commissioners gave the green light to a proposal to install a CASA weather radar unit at the Johnson County Emergency Operations Center
What will it take to make tornado prediction better?
New weather radar installed at UNT-Denton
New CASA sensor at Discovery Park to help better predict storms
UNT Installs CASA Weather System Radar
UNT to install advanced weather radar system today
Advanced radar will improve storm warnings in North Texas
UTA Home to Powerful CASA Radar
New radar provides the lowdown on Dallas-Fort Worth weather
Editorial - Faster storm tracking is a worthwhile investment
New UT Arlington Radar Will Help With Local Severe Weather
Advanced radar system lands in North Texas
CASA radar installed at University of Arlington,Texas
Professor David McLaughlin speaks at UMass Alumni event in Redmond WA on October 10, 2012
CASA Director David McLaughlin presents Distinguished Faculty Lecture and receives Chancellor's Medal.
The CASA radar system will be tested in the Dallas - Fort Worth area in spring 2012.
New low-power radars will provide better storm coverage.
Colorado State University honors Professor Chandrasekar with award for innovative excellence.
CASA Researcher Joe Trainor (UDel) gave the keynote talk for the Integrated Warning Team meeting organized by the National Weather Service Fort Worth Forecast Office.
Brenda Philips discusses latest research.
Precision twister tracking
A System to Speed Up Forecasting Tornadoes
CASA researchers try to improve warning systems in the hopes of saving more lives.
CASA Team Tracks Tornadoes
ABCNEWS.com publishes - Radar Detects Tornadoes Faster
David McLaughlin, Kevin Kloesel, Paul Smith, and John Armstrong have been named to newest National Academy Panel study on Weather Service modernization.
In the recently published report, Observing Weather and Climate from the Ground Up: A Nationwide Network of Networks, the National Academy Press notes CASAs significant contribution to the future development of weather observation and prediction.
CASA Works to Solve Doppler Radar Problems that Could Aid Wind Energy Industry
In July 2010, the Central American and Caribbean Games at Mayaguez provided a real-world test that revealed the power of the CASA Student test bed.
CSU has hand in new Tornado Radar
IEEE International Conference on Systems, Man, and Cybernetics Best Student Paper Award awarded to Don J. Rude, Ellen J. Bass and Brenda Philips.
Chris Meyers of UVA (advisor Roman Krzysztofowicz) is a finalist in the UVA Undergraduate Research and Design Symposium 2010.
A UMass-Amherst team is incorporating their Virtual Sensing Environment (ViSE) into Global Environment for Network Innovations (GENI) prototyping.
CASA Associate Director Ming Xue,and meteorology graduate research assistant, Nathan Snook, were featured in ScienceNow.
CASA submitted a congressionally funded report on the feasibility of new technologies to fill coverage gaps in todays national weather radar network.
Data from the CASA radar network is now LIVE on NBC 5 TV station in Dallas Fort Worth, bringing high resolution radar imagery to millions in North Central Texas.
FULL ARTICLE